BMA180 Three-Axis Accelerometer Demo Test with Arduino
They are a lot of postures sensors are available on our sites, such as ITG3200、ADXL345、ADXL335、HMC5883L、MPU6050、BMP085、MMA7361, and these ICs are more used on flying control, now we did some simple test with the Bosch BMA180 module.
Bosch BMA180 three axis digital accelerometer module has great performance than many others, it provides 14 bits digital output via a four-wires SPI jack or two-wires IIC (I2C) jack. Testing range can be set to ±1g, 1.5g, 2g, 4g, 8g, or 16g.
Further functions such as programmerable wake up, high or low g detection, water detection, slope detection, self-detection. This sensor has two operation modes: low filter, low power. BMA180 use a very tiny 3x3mm 12 pins LGA package, and it can works between 1.62 till 3.6V VDD and 1.2V till 3.6V VDDIO power, normally it only consume 650uA in standard mode.
Application
BMA 180 is a high performance three axis digital accelerometer sensor, aiming at low power consumer market.
Due to the high precision, it widely uses in Sen-Ses, motion, shock and vibration in cell phone, PDA and computer, human and machin e interface, face recognition, virtual reality or game control.
Please read more information on our BMA180 product page here, and check the datasheet in the product page too.
Pin Map of BMA 180

Compare BMA 180 with ADXL 345

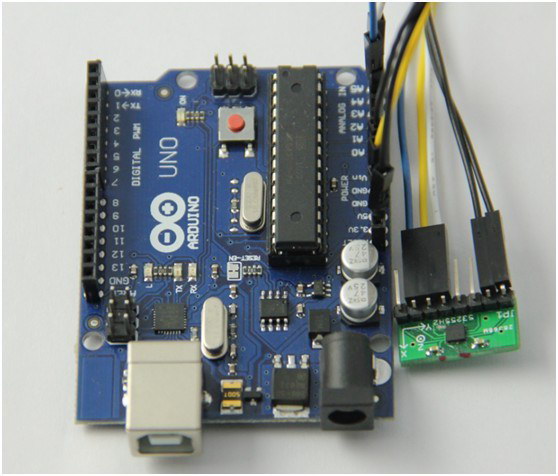
Wiring
Wire the BMA180 module to Arduino
Demo code
after the wiring, now we can put the following demo codes into your arduino.
[c]
#include
void setup()
{
Serial.begin(115200);
Wire.begin();
Serial.println("Demo started, initializing sensors");
AccelerometerInit();
// GyroInit();
Serial.println("Sensors have been initialized");
}
void AccelerometerInit()
{
Wire.beginTransmission(0x40); // address of the accelerometer
// reset the accelerometer
Wire.send(0x10);
Wire.send(0xB6);
Wire.endTransmission();
delay(10);
Wire.beginTransmission(0x40); // address of the accelerometer
// low pass filter, range settings
Wire.send(0x0D);
Wire.send(0x10);
Wire.endTransmission();
Wire.beginTransmission(0x40); // address of the accelerometer
Wire.send(0x20); // read from here
Wire.endTransmission();
Wire.requestFrom(0x40, 1);
byte data = Wire.receive();
Wire.beginTransmission(0x40); // address of the accelerometer
Wire.send(0x20);
Wire.send(data & 0x0F); // low pass filter to 10 Hz
Wire.endTransmission();
Wire.beginTransmission(0x40); // address of the accelerometer
Wire.send(0x35); // read from here
Wire.endTransmission();
Wire.requestFrom(0x40, 1);
data = Wire.receive();
Wire.beginTransmission(0x40); // address of the accelerometer
Wire.send(0x35);
Wire.send((data & 0xF1) | 0x04); // range +/- 2g
Wire.endTransmission();
}
void AccelerometerRead()
{
Wire.beginTransmission(0x40); // address of the accelerometer
Wire.send(0x02); // set read pointer to data
Wire.endTransmission();
Wire.requestFrom(0x40, 6);
// read in the 3 axis data, each one is 16 bits
// print the data to terminal
Serial.print("Accelerometer: X = ");
short data = Wire.receive();
data += Wire.receive() << 8;
Serial.print(data);
Serial.print(" , Y = ");
data = Wire.receive();
data += Wire.receive() << 8;
Serial.print(data);
Serial.print(" , Z = ");
data = Wire.receive();
data += Wire.receive() << 8;
Serial.print(data);
Serial.println();
}
/*void GyroInit()
{
Wire.beginTransmission(0x69); // address of the gyro
// reset the gyro
Wire.send(0x3E);
Wire.send(0x80);
Wire.endTransmission();
Wire.beginTransmission(0x69); // address of the gyro
// low pass filter 10 Hz
Wire.send(0x16);
Wire.send(0x1D);
Wire.endTransmission();
Wire.beginTransmission(0x69); // address of the gyro
// use internal oscillator
Wire.send(0x3E);
Wire.send(0x01);
Wire.endTransmission();
}
void GyroRead()
{
Wire.beginTransmission(0x69); // address of the gyro
Wire.send(0x1D); // set read pointer
Wire.endTransmission();
Wire.requestFrom(0x69, 6);
// read in 3 axis of data, 16 bits each, print to terminal
short data = Wire.receive() << 8;
data += Wire.receive();
Serial.print("Gyro: X = ");
Serial.print(data);
Serial.print(" , Y = ");
data = Wire.receive() << 8;
data += Wire.receive();
Serial.print(data);
Serial.print(" , Z = ");
data = Wire.receive() << 8;
data += Wire.receive();
Serial.print(data);
Serial.println();
} */
void loop()
{
AccelerometerRead();
// GyroRead();
delay(500); // slow down output
}
[/c]
From the arduino monitor, we can see the output from the sensor looks like this.






Comments (8)
this code dont work arduino + html code.please check the code
It error
“‘amp’ was not declared in this scope”
on this line
“Wire.send(data & 0x0F); // low pass filter to 10 Hz”
Hi Tevada,
Try both Arduino 22 version and Arduino 1.0 version, it could be a problem of the IIC library.
I have used both Arduino 0.22 and 1.0, it can’t work.
error
“‘amp’ was not declared in this scope”
Got the same prob, and I’ve got the latest Arduino version. =/
sketch_oct15a.cpp: In function ‘void AccelerometerInit()’:
sketch_oct15a:37: error: ‘amp’ was not declared in this scope
#include
void setup()
{
Serial.begin(115200);
Wire.begin();
Serial.println(“Demo started, initializing sensors”);
AccelerometerInit();
// GyroInit();
Serial.println(“Sensors have been initialized”);
}
void AccelerometerInit()
{
Wire.beginTransmission(0x40); // address of the accelerometer
// reset the accelerometer
Wire.write(0x10);
Wire.write(0xB6);
Wire.endTransmission();
delay(10);
Wire.beginTransmission(0x40); // address of the accelerometer
// low pass filter, range settings
Wire.write(0x0D);
Wire.write(0x10);
Wire.endTransmission();
Wire.beginTransmission(0x40); // address of the accelerometer
Wire.write(0x20); // read from here
Wire.endTransmission();
Wire.requestFrom(0x40, 1);
byte data = Wire.read();
Wire.beginTransmission(0x40); // address of the accelerometer
Wire.write(0x20);
Wire.write(data & 0x0F); // low pass filter to 10 Hz
Wire.endTransmission();
Wire.beginTransmission(0x40); // address of the accelerometer
Wire.write(0x35); // read from here
Wire.endTransmission();
Wire.requestFrom(0x40, 1);
data = Wire.read();
Wire.beginTransmission(0x40); // address of the accelerometer
Wire.write(0x35);
Wire.write((data & 0xF1) | 0x04); // range +/- 2g
Wire.endTransmission();
}
void AccelerometerRead()
{
Wire.beginTransmission(0x40); // address of the accelerometer
Wire.write(0x02); // set read pointer to data
Wire.endTransmission();
Wire.requestFrom(0x40, 6);
// read in the 3 axis data, each one is 16 bits
// print the data to terminal
Serial.print(“Accelerometer: X = “);
short data = Wire.read();
data += Wire.read() << 8;
Serial.print(data);
Serial.print(" , Y = ");
data = Wire.read();
data += Wire.read() << 8;
Serial.print(data);
Serial.print(" , Z = ");
data = Wire.read();
data += Wire.read() << 8;
Serial.print(data);
Serial.println();
}
/*void GyroInit()
{
Wire.beginTransmission(0x69); // address of the gyro
// reset the gyro
Wire.send(0x3E);
Wire.send(0x80);
Wire.endTransmission();
Wire.beginTransmission(0x69); // address of the gyro
// low pass filter 10 Hz
Wire.send(0x16);
Wire.send(0x1D);
Wire.endTransmission();
Wire.beginTransmission(0x69); // address of the gyro
// use internal oscillator
Wire.send(0x3E);
Wire.send(0x01);
Wire.endTransmission();
}
void GyroRead()
{
Wire.beginTransmission(0x69); // address of the gyro
Wire.send(0x1D); // set read pointer
Wire.endTransmission();
Wire.requestFrom(0x69, 6);
// read in 3 axis of data, 16 bits each, print to terminal
short data = Wire.receive() << 8;
data += Wire.receive();
Serial.print("Gyro: X = ");
Serial.print(data);
Serial.print(" , Y = ");
data = Wire.receive() << 8;
data += Wire.receive();
Serial.print(data);
Serial.print(" , Z = ");
data = Wire.receive() << 8;
data += Wire.receive();
Serial.print(data);
Serial.println();
} */
void loop()
{
AccelerometerRead();
// GyroRead();
delay(500); // slow down output
}
The problem here is with the ‘curley’ speech marks on the comments sent to the Serial Monitor.
Make these the normal quotation marks i.e. ” ” and the programme will compile with no issue.
Ian.
Can you believe that guys used these and awesome PID loops on the early quadcopters.